


現代の物流業界の急速な発展に伴い、4方向シャトル車両立体倉庫は、効率的で高密度な保管機能、運用コスト、体系的なインテリジェントな利点により、自動化された立体倉庫の主流の形態の1つになりました。倉庫システムでの管理。

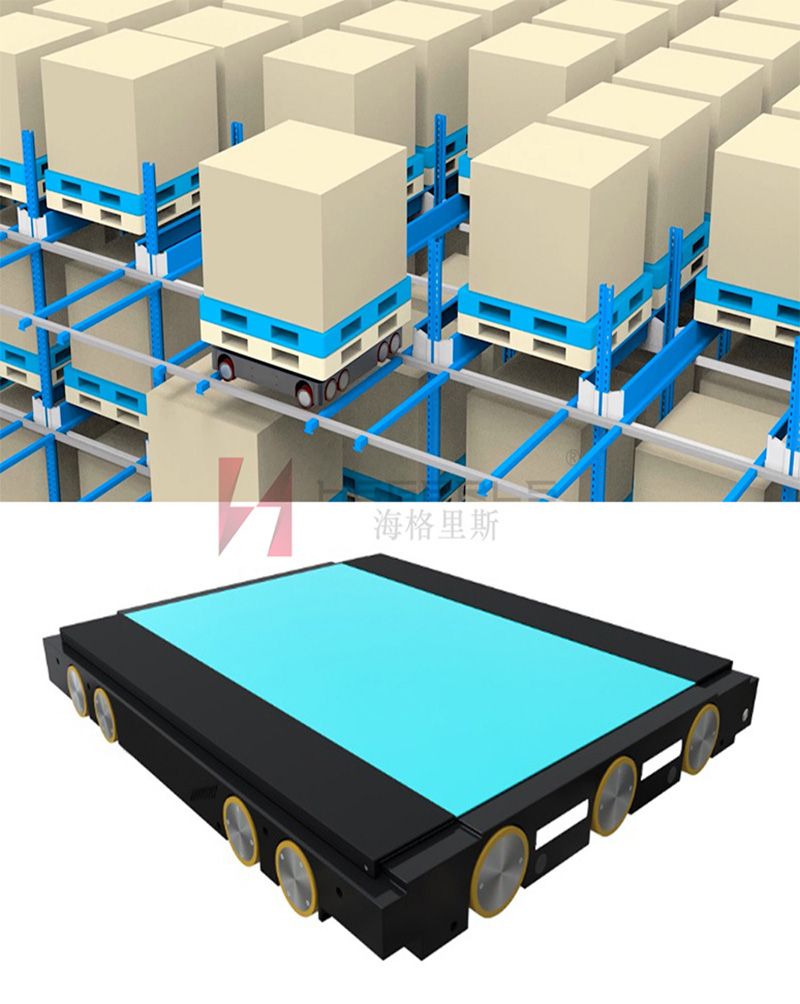
4方向シャトルカー立体倉庫は、自動立体倉庫の一種で、4方向シャトルカー、立体棚、エレベーター、トレイコンベアライン、昇降機、ソフトウェア制御システムで構成されています。 。棚セクションは商品を保管するために使用され、4方向シャトルは棚上の商品を輸送するために使用され、ソフトウェア制御システムは4方向シャトルおよびその他の自動化機器の動作を制御し、実際の状況を記録するために使用されます。商品の。 4方向シャトルカー立体倉庫は、不規則、不規則、アスペクト比が大きい、または少量品種大バッチ、多品種大バッチ倉庫に適用できる一般的な自動立体倉庫ソリューションです。 4方向シャトルカーの上下左右の動きを利用し、エレベータと連携して段替え作業を行うことで、低流量・高密度保管から大流量・高流量の保管に適した物品の自動入庫・取り出しを実現します。高密度ストレージ。フォーウェイシャトル立体倉庫システムは、自動段積み、自動ハンドリング、無人案内などの複数の機能を統合した新しいタイプのインテリジェント倉庫システムです。倉庫物流および電子商取引業界の急速な発展に伴い、広く適用されています。

4 方向シャトル車両の 3 次元倉庫は、制御スケジュール、注文管理、ルート最適化アルゴリズムなどの面でより複雑であり、プロジェクトの実施がより困難になっています。したがって、サプライヤーは比較的少なく、河北和科金属製品有限公司 (自社ブランド: HEGERLS) は数少ないサプライヤーの 1 つです。
手動による倉庫棚の保管と出荷と比較して、4 方向シャトル ソリューションは、フラットな「商品から人へ」システムを多層 3D「商品から人へ」システムに進化させ、より高度で高密度の保管を備えた自動化された 3 次元倉庫を作成します。スペース。 HEGERLS 4 方向シャトル 3 次元倉庫ソリューションは、パレット、ビン、段ボール箱などの車両仕様の保管に適しており、さまざまな複雑な空間レイアウトや業界シナリオに適しています。同じ空間レイアウト システムにおいて、HEGERLS の 4 方向シャトル車両 3 次元倉庫システムは、従来の倉庫システムと比較して高度な自動化と強力な入出荷処理機能を備えており、タスク処理時間を大幅に短縮できます。
HEGERLS 4方向シャトルカー立体倉庫の運用プロセス
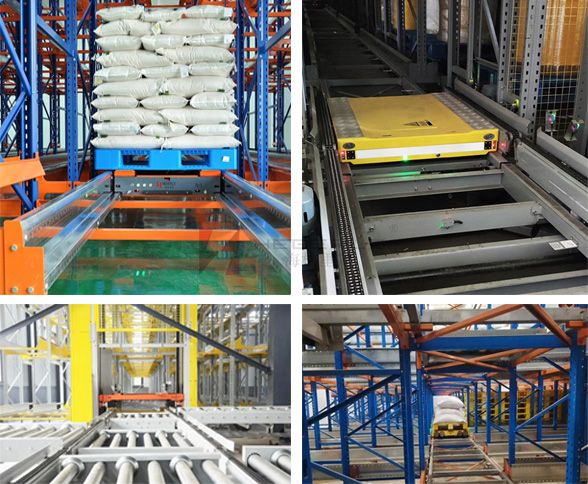
1) 保管:保管トレイをフォークリフトで直接保管口に置き、保管ボタンを押すとコンベアラインが保管方向に移動します。外観検査後、商品が正しく設置されているかを検査します。資格がある場合は、保存され、バーコードでスキャンされます。適合しない場合、商品は倉庫に戻され、手動で再配置されます。バーコード スキャナはパレット コードをスキャンします。スキャンが成功すると、WCS (制御システム) はバーコード値を WMS にフィードバックします。 WMS (コンピュータ管理情報システム) は、バーコード値に基づいて貨物の位置を割り当て、WCS に送信します (貨物位置の層数、行、列、深さなどの情報を含む)。 WCS は受信した貨物の位置情報を PLC に送信します。 PLC は、保管先アドレスを取得することによってコンベア ラインの動作を制御します。同時にホイストを制御して目的の層まで商品を輸送します。スキャナがコードのスキャンに失敗した場合、WCS はスキャン失敗の結果を WMS にフィードバックし、コンベア ラインは動作を停止して手動処理を待ちます。 WMS によってスキャン値が無効であると判断された場合、コンベア ラインは動作を停止し、手動処理を待ちます。オペレーターはハンドヘルド端末を使用してコードを再度スキャンしたり、バーコード情報を置き換えたりして、異常なスキャン状況に対処できます。加工のために商品を返却する必要がある場合は、保管ポートの「返却ボタン」を押すと、商品は保管ポートに返却されて処理されます。
2) エレベーター入口で商品がコンベアラインに移動するのを待つのをやめます。 PLCは保管先住所から商品が到達する必要がある棚の段数を確認し、エレベーターを呼びます。エレベーターが 1 階に到着すると、コンベア ラインが商品をエレベーターに運び、商品はエレベーターを通過して目的の階に到着します。エレベーターが目的の層に到着すると、商品はエレベーターのコンベアラインとともにエレベーターから出て、ピックアップポートでシャトルトラックが商品をピックアップするのを待ちます。
3) WMS (コンピュータ管理情報システム) は定期的に受信タスクを送信し、WCS (制御システム) は受信タスクを受信して、商品の目的地のシャトル車両に送信します。シャトルは到着指示を受信し、目的地レベルの集荷ポートまで運転して商品を受け取り、目的地の貨物場所まで輸送します。 WMS (Computer Management Information System) は一度に 1 つのタスクを発行し、WCS (Control System) は WMS (Computer Management Information System) が発行したタスクの順序に基づいてインバウンドおよびアウトバウンドのタスクを実行します。 WMS (コンピュータ管理情報システム) が受信タスクを発行する前に、送信タスクが完了したかどうかを判断する必要があります。アウトバウンドタスクの完了後、コンベアラインリソースの占有によるデッドロックを防ぐためにインバウンドタスクが発行されます。
4) アウトバウンド: WMS (コンピュータ管理情報システム) は、アウトバウンド タスク (開始アドレスと宛先アドレスを含む) を WCS (制御システム) に発行します。 WCS (制御システム) がアウトバウンドタスクを受信した後、アウトバウンド商品はシャトルカーによって現在の商品レベルでエレベーターコンベアラインに輸送されます。商品はエレベーター入口のコンベアライン上で待機を停止し、PLC は商品の現在のレベルに到達するようにエレベーターを制御します。エレベーターが商品の現在のレベルに到達すると、コンベア ラインが商品をエレベーターに運びます。エレベーターは商品を 1 階まで運び、商品はエレベーターから出ます。コンベアラインは商品を出口まで運びます。トレイを手動で取り外し、アウトバウンドプロセスを完了します。
5) 倉庫の入庫、出庫、および移動 (搬出、搬入) の場所は WMS システムによって割り当てられますが、倉庫管理システムは場所の割り当てをサポートしていません。インテリジェント シャトル車両の移動経路中にトレイがブロックしている場合、WMS は最初に倉庫移動タスクを発行し、後続のタスクを発行する前にブロック トレイを取り除く必要があります。
6) 自動制御システム (WCS) は、最初に受信したタスクから、受信時刻の順にタスクを実行します。
7) WMS (Computer Management Information System) は定期的にタスクを発行し、WCS は内部で優先順位を付けた上で、毎回 1 つのタスクを発行します。
8) 自動化装置の実行効率は、商品の保管と配置の順序、倉庫からの退出方法、トンネルの深さと密接に関係しています。これらの方法により、最終自動化機器の実際の効率が決まります。自動化機器の効率は、上記のシナリオで動作することを前提とした効率に基づいています。
9) ある層のシャトル車両に故障が発生した場合、手動で故障情報を確認した上で、故障車両を上り下りの経路に影響のない場所に移動させることができます。他のレイヤー上のアイドル状態の車両を持ち上げて、障害のある車両レイヤーに置き換えてタスクを実行することができます。
河北和科は、関連機器技術の特許を取得した有名メーカーとして、毎年、関連インテリジェント機器技術の研究開発とアップグレードに多額の資金を投資してきました。自社ブランドの HEGERLS 工場は自動化された生産ラインとインテリジェントな管理を備え、現在では世界的に展開されています。ヨーロッパ、アメリカ、中東、中南米、東南アジアなどの国と地域で多くのお客様から信頼されており、インテリジェントシャトルカーを独自に設計・生産しています多層シャトルカー、親子シャトルカー、4ウェイシャトルカーやトンネルスタッカーは、多くの企業の自動三次元倉庫装置ブランドとして指定されています。
投稿日時: 2023 年 5 月 15 日