



自動立体倉庫は物流の重要な部分です。これには、土地の節約、労働集中の軽減、エラーの排除、倉庫の自動化と管理のレベルの向上、管理とオペレーターの品質の向上、保管と輸送の損失の削減、運転資金の未処理の効果的な削減、物流の改善など、多くの利点があります。同時に、工場レベルのコンピューター管理情報システムと接続され、生産ラインと密接に接続された自動立体倉庫は、CIMS (コンピューター統合生産システム) と FMS (フレキシブル生産システム) の重要な重要なリンクです。また、物流を直接人手を介さずに自動的に保管・搬出するシステムです。現代産業社会の発展に伴うハイテク製品であり、企業にとって生産性の向上やコスト削減が重要な役割を果たしています。
近年、企業の生産と管理の継続的な改善に伴い、物流システムの改善と合理化が企業の発展にとって非常に重要であることを認識する企業が増えています。スタッカーは立体自動倉庫において最も重要な昇降・段積み設備です。手動操作、半自動操作、または全自動操作により、ある場所から別の場所に物品を輸送できます。自動化された 3 次元レーンを往復し、レーン入口で貨物室に商品を保管できます。あるいは逆に、貨物室の商品を取り出して車線交差点まで輸送します。つまり、スタッカーは、昇降装置を備えたレールまたは無軌道台車です。スタッカーには、スタッカーを駆動してパレットを移動および持ち上げるためのモーターが装備されています。スタッカーが必要な貨物スペースを見つけると、部品や貨物ボックスをラックに押し込んだりラックから引き出したりできます。スタッカーには水平方向の動きや揚程を感知するセンサーが搭載されており、荷室の位置や高さを把握することができ、場合によってはコンテナ内の部品名やその他の関連部品情報も読み取ることができます。
コンピュータ制御技術と自動立体倉庫の発展に伴い、スタッカーの用途はますます拡大し、技術的性能はますます向上し、高さも増加しています。これまでのところ、スタッカーの高さは40メートルに達することができます。実際、倉庫の構造やコストの制限がなければ、スタッカーの高さは自由に設定できます。スタッカーの動作速度も常に向上しています。現在、スタッカーの水平動作速度は最大200m/min(負荷の小さいスタッカーは300m/minに達しています)、昇降速度は最大120m/min、フォークの伸縮速度は最大50mです。 /分
スタッカーの構成
スタッカーはフレーム(上ビーム、下ビーム、コラム)、水平走行機構、昇降機構、荷台、フォーク、電気制御システムから構成されます。詳細は以下のとおりです。
フレーム
フレームは上梁、左右の柱、下梁から構成される長方形のフレームで、主に軸受けに使用されます。部品の取り付けを容易にし、スタッカーの軽量化を図るため、上下の梁は溝形鋼、柱は角鋼を使用しています。上部梁には天レールストッパーとバッファが設けられ、下部梁には地上レールストッパーが設けられている。
動作機構
走行機構はスタッカーの水平移動の駆動機構であり、一般にモーター、カップリング、ブレーキ、減速機、走行輪などで構成されます。走行機構の位置の違いにより、地上走行型、上部走行型、中間走行型に分けられます。地上走行型を採用した場合、地上に設置されたモノレールに沿って走行するには4つの車輪が必要となります。スタッカーの上部は、上部ビームに固定された I ビームに沿って 2 組の水平ホイールによってガイドされます。上部の梁はボルトと柱で接続され、下部の梁は溝形鋼と鋼板で溶接されています。走行駆動機構、マスター・スレーブモーターホイール、電気キャビネットなどが搭載されています。また、トンネル両端でのスタッカーの制御不能による大きな衝突力の発生を防ぐため、下部ビームの両側にも緩衝装置が設置されています。スタッカーが曲線を描く必要がある場合は、ガイド レールにいくつかの改良を加えることができます。
昇降機構
昇降機構は荷台を上下に移動させる機構です。通常、モーター、ブレーキ、減速機、ドラムまたはホイール、および柔軟な部品で構成されます。一般的に使用される柔軟な部品には、スチール ワイヤ ロープや吊り上げチェーンなどがあります。一般的な減速機に加え、大きな減速比が必要なため、ウォーム減速機や遊星減速機が使用されます。ほとんどの昇降チェーン伝動装置は上部に設置されており、昇降力を軽減するためにカウンターウェイトが装備されていることがよくあります。昇降機構をコンパクトにするため、ブレーキ付モーターが使用されることが多いです。チェーンはコラム上のギアを介してパレットに固定されています。垂直昇降サポートコンポーネントはコラムです。コラムは歪みを一次防止したボックス構造で、コラムの両側にガイドレールが設置されています。コラムには上下限位置スイッチなども装備されています。
フォーク
主にモーター減速機、スプロケット、チェーン接続装置、フォークプレート、可動ガイドレール、固定ガイドレール、ローラーベアリング、およびいくつかの位置決め装置で構成されています。フォーク機構は、スタッカーが商品にアクセスするための実行機構です。スタッカーのパレット上に設置し、水平方向に伸縮することで、貨物グリッドの両側に荷物を送り出したり、取り出したりすることができます。一般にフォークは、フォークの本数に応じてシングルフォーク、ダブルフォーク、マルチフォークに分けられ、マルチフォークは特殊な商品の積み重ねに主に使用されます。フォークは主に3段リニアディファレンシャルテレスコピックフォークを採用しており、アッパーフォーク、ミドルフォーク、ロワーフォーク、ガイド機能付きニードルローラーベアリングで構成されており、車道幅を狭めて十分なテレスコピックトラベルを確保しています。フォークはその構造によりギアラックモードとスプロケットチェーンモードの2種類に分けられます。フォークの伸縮原理は、下部フォークがパレットに取り付けられ、中間フォークがギアバーまたはスプロケットバーによって駆動されて、下部フォークの焦点からその長さの約半分だけ左または右に移動し、上部フォークは、中央フォークの中間点から、それ自身の長さの半分よりわずかに長い長さだけ、左または右に延びる。上部フォークは 2 本のローラー チェーンまたはワイヤー ロープによって駆動されます。チェーンまたはワイヤロープの一端は下部フォークまたはパレットに固定され、もう一端は上部フォークに固定されます。
昇降機構とパレット
昇降機構は主に昇降モータ(減速機含む)、ドライブスプロケット、ドライブチェーン、ダブルスプロケット、昇降チェーン、アイドラスプロケットで構成されます。リフティングチェーンは安全率5以上の複列ローラチェーンで、パレット上のアイドラスプロケットと上下のビームで密閉構造を形成しています。昇降モーターが駆動チェーンを介してダブルチェーンホイールを回転させると、昇降チェーンが動き、それによって昇降プラットフォーム (フォークや商品を含む) が上昇および下降します。昇降モーターは PLC 周波数変換によって制御され、昇降開始時と停止時の昇降チェーンの過度の張力を回避します。荷台は主に平らな貫通鋼板と溶接鋼板でできており、主にフォークといくつかの安全保護装置の取り付けに使用されます。パレットの安定した上下運動を確保するために、パレットの両側に4つのガイドホイールとコラムに沿った2つのトップホイールが取り付けられています。
電気機器および制御
主に電気駆動、信号伝送、スタッカー制御が含まれます。スタッカーは電源供給にスライド式接触線を採用しています。電源摺動線搬送通信はパワークラッターによる干渉を受けやすいため、コンピュータや他の倉庫機器との情報交換には耐干渉性の高い赤外線通信モードを採用しています。スタッカーの動作特性は、正確に位置決めしてアドレス指定する必要があることです。そうでないと、間違った商品が取り込まれ、商品や棚が損傷し、深刻な場合にはスタッカー自体が損傷します。スタッカーの位置制御は絶対アドレス認識方式を採用しており、レーザー距離計を使用してスタッカーから基点までの距離を測定し、事前にPLCに格納されているデータと比較することでスタッカーの現在位置を割り出します。コストは高いですが、信頼性は高いです。
安全保護装置
スタッカーは昇降機械の一種で、高くて狭いトンネル内を高速で走行する必要があります。人員と機器の安全を確保するために、スタッカーには完全なハードウェアおよびソフトウェアの安全保護装置が装備されている必要があり、電気制御には一連のインターロックおよび保護措置が講じられなければなりません。主な安全保護装置には、端子制限保護、インターロック保護、ポジティブ位置検出制御、荷台ロープ切断保護、電源オフ保護などが含まれます。

スタッカーの形式の決定: スタッカーには、モノレール トンネル スタッカー、ダブル レール トンネル スタッカー、回転トンネル スタッカー、単列スタッカー、複列スタッカーなど、さまざまな形式があります。
スタッカー速度の決定: 倉庫の流れ要件に従って、スタッカーの水平速度、昇降速度、フォーク速度を計算します。
その他のパラメータと構成: スタッカーの位置決めモードと通信モードは、倉庫の現場条件とユーザーの要件に従って選択されます。スタッカーの構成は、特定の状況に応じて高または低にすることができます。

自動立体倉庫スタッカーの活用
※操作パネルは日頃から清潔に保ち、ほこりや油分などの清掃を心がけてください。
※タッチパネルや操作パネル内の電気部品は湿気により傷みやすいため、清潔に保ってください。
※操作パネルを清掃する際は、油汚れなどの腐食性洗剤を使用しないよう、濡れた布で拭くことをお勧めします。
※AGVを移動させる場合は、まずドライブを持ち上げる必要があります。何らかの理由でドライブを持ち上げることができない場合は、AGV の電源をオフにする必要があります。ドライブの電源がオンになっていて、ドライブが持ち上げられていないときに AGV を移動することは固く禁止されています。
※AGVを緊急停止する必要がある場合は、非常ボタンを使用してください。 AGV トロリーを強制的に停止させるために、ドラッグまたはその他の干渉方法を使用することは禁止されています。
※操作パネルの上に物を置くことは禁止です。
立体倉庫自動スタッカーの日常メンテナンス
※スタッカー内や道路上の雑貨や異物を清掃してください。
※ドライブ、ホイスト、フォーク位置に油漏れがないか確認してください。
※ケーブルの垂直位置を確認してください。
※コラムのガイドレール、ガイドホイールの摩耗を検出します。
※スタッカーに搭載されている電子光目・センサーを清掃してください。
※スタッカーに搭載されている電子光学目・センサーの機能テスト。
※駆動、車輪の動作(磨耗)を確認してください。
※付属品を確認し、サポートホイールに損傷がないか確認してください。
※コラム接続部及びボルト接続部の溶接位置に亀裂が無いことを確認してください。
※歯付ベルトの水平位置を確認してください。
※スタッカーの可動性を確認してください。
※スタッカーの塗装作業を目視で検査します。

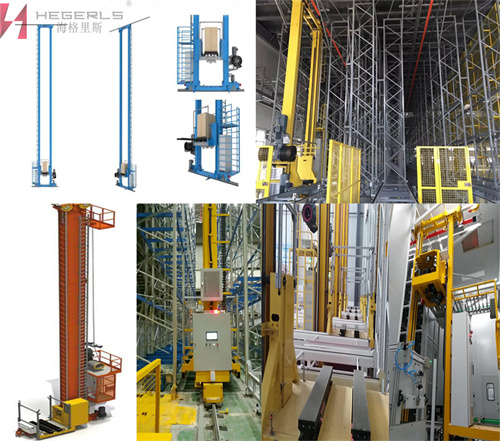
現代の工業生産の発展に伴い、立体倉庫におけるスタッカーの用途はさらに拡大し、主に機械製造、自動車製造、繊維産業、鉄道、タバコ、医療などの産業で使用されます。自動倉庫での保管に最適です。 Hagerls は、自動化機器をサポートするインテリジェント倉庫およびインテリジェント物流のソリューション、設計、製造、設置サービスに焦点を当てた総合企業です。シングルカラムスタッカー、ダブルカラムスタッカー、ターニングスタッカー、ダブルエクステンションスタッカー、ビンスタッカーなどの機器を顧客に提供できます。サイズや重量を問わず、さまざまな製品に合わせて各種スタッカー装置をカスタマイズできます。
投稿日時: 2022 年 8 月 18 日